Engineering Downloads
Let’s Learn and Collaborate

Overview
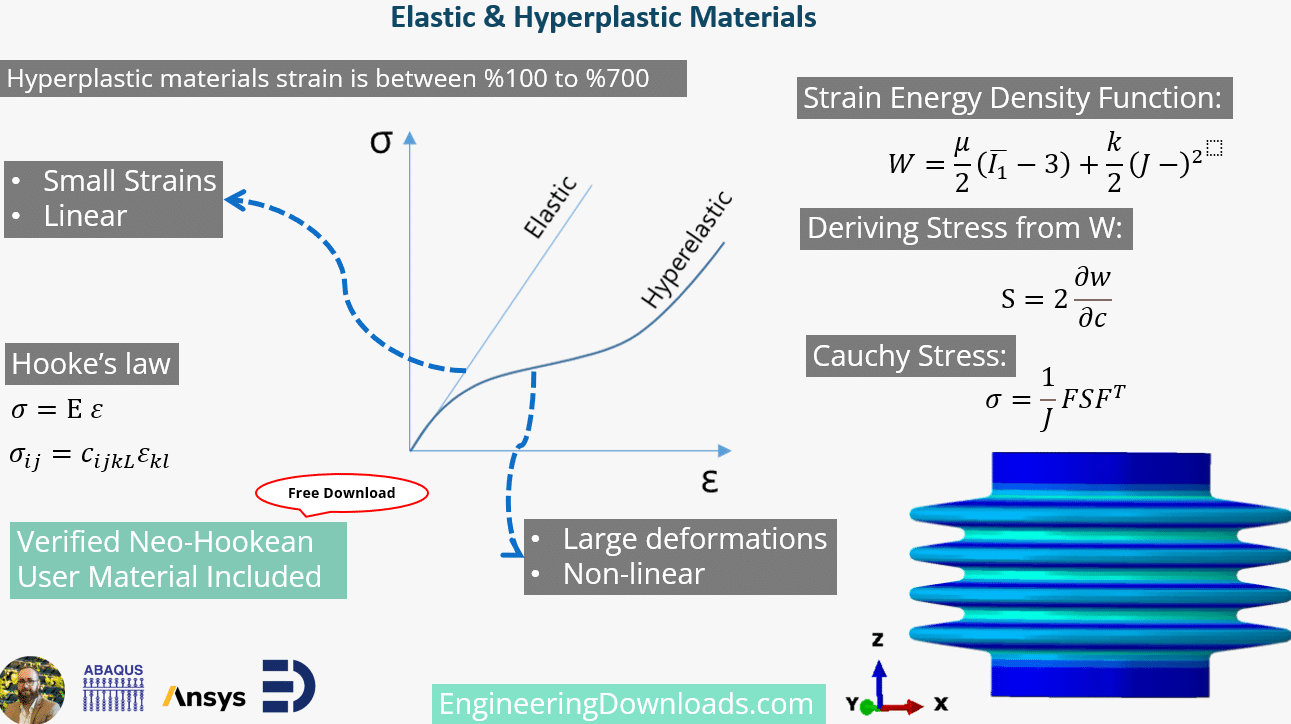
This product provides a ready-to-use Abaqus simulation package for analyzing boot seals in automotive constant velocity joints. It demonstrates large-deformation hyperelastic behavior, 3D deformable-to-deformable contact, and self-contact using a neo-Hookean material model implemented via a robust Fortran UMAT subroutine. Validate your seal designs under extreme angulation and compression scenarios with this verified solution.
Key Features
✅ Realistic Boot Seal Simulation
✅ Advanced Material Modeling
✅ Efficient Contact Handling
✅ UMAT Subroutine
Model Workflow
What’s Included
Source Code
Applications
Technical Specifications
| Aspect | Detail |
| Solver | Abaqus/Standard |
| Elements | C3D8H (hybrid brick) |
| Material | Slightly compressible neo-Hookean |
| Contact | Finite-sliding, self-contact |
| Subroutine | UMAT (Fortran) |
Why Choose This Package?
This model was made from Abaqus documentation files.

Abaqus
€97,00 €54,00
Engineering files
€60,00 €50,00
Abaqus
€146,00 €89,00
Abaqus
€85,00 €47,00
Abaqus
€78,00 €39,00
See more

Want to receive push notifications for all major on-site activities?