In the world of advanced engineering simulations, dealing with nonlinear behavior is not just common—it’s often the norm. Whether you’re designing aerospace components, analyzing structural integrity in oil & gas pipelines, or optimizing biomechanical implants, your Finite Element Analysis (FEA) or Computational Fluid Dynamics (CFD) models will frequently encounter nonlinearities. The crucial hurdle in these scenarios? Achieving robust and accurate nonlinear convergence.

Illustration of Newton-Raphson method, a common iterative technique used in nonlinear solvers to achieve convergence. Source: Wikimedia Commons.
This article dives deep into the practical aspects of nonlinear convergence. We’ll explore why it’s so vital, how it works in common simulation software like Abaqus, ANSYS Mechanical, and OpenFOAM, and provide actionable strategies to ensure your analyses yield reliable results. Let’s get started on turning simulation struggles into success stories.
Understanding Nonlinear Convergence in Engineering Simulations
When you run an engineering simulation, you’re essentially solving a set of complex equations that describe the physical behavior of your system. In linear analyses, these equations are straightforward, and a direct solution can often be found. However, real-world engineering problems are rarely purely linear. This is where nonlinear convergence becomes paramount.
The Core Concept: Why Solutions Don’t Just Pop Out
For nonlinear problems, the relationship between cause (e.g., applied load) and effect (e.g., deformation, stress, flow rate) is not proportional. This means that a direct solution isn’t possible. Instead, solvers employ iterative methods, incrementally applying loads or time steps and refining the solution at each step until a predefined tolerance is met. This iterative refinement process, aiming for a stable and accurate state, is what we call nonlinear convergence.
Types of Nonlinearity
Understanding the source of nonlinearity in your model is the first step toward successful convergence. These can broadly be categorized into:
Material Nonlinearity
- Plasticity: Materials like steel or aluminum exhibit elastic behavior up to a certain point, after which they deform plastically, meaning they don’t return to their original shape. Simulating this requires complex constitutive models (e.g., von Mises plasticity, Johnson-Cook for high strain rates).
- Hyperelasticity: Materials like rubber or biological tissues undergo large elastic deformations. Their stress-strain relationship is highly nonlinear and often depends on the strain energy density function (e.g., Mooney-Rivlin, Ogden models).
- Creep & Viscoelasticity: Time-dependent material behavior where deformation continues under constant stress (creep) or where stress depends on the rate of strain (viscoelasticity).
Geometric Nonlinearity (Large Deformations)
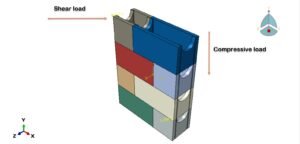
- When deformations are large enough to significantly change the stiffness or load-carrying capacity of a structure, geometric nonlinearity must be considered. Think of a thin plate buckling under compression or a cable undergoing significant sag. The equilibrium equations must be formulated with respect to the deformed geometry.
- Software like Abaqus and ANSYS typically activate ‘NLGEOM’ or ‘Large Deformations’ options to account for this.
Contact Nonlinearity
- This is perhaps one of the most common and challenging nonlinearities. It arises when two or more components come into contact or separate during a simulation. The contact status (open/closed, sliding/sticking) changes nonlinearly depending on the deformation and forces. Think of a bolt tightening, gears meshing, or a tire on pavement.
Boundary Condition Nonlinearity
- Sometimes, boundary conditions themselves can be nonlinear. For instance, a friction coefficient that varies with sliding velocity or a pressure load that depends on the current deformed surface area. While less common as a primary source of convergence issues, it can contribute to overall solution complexity.
How Nonlinear Solvers Work: A Glimpse into Iteration
At its heart, a nonlinear solver attempts to find a state of equilibrium where the applied forces (or fluxes) are balanced by the internal resistive forces. Since this balance point isn’t known upfront, the solver takes iterative steps.
Iterative Nature of Nonlinear Problems
Imagine pushing a spring that gets stiffer the more you compress it. If you apply a large force all at once, you won’t know the final compression. Instead, you apply a small push, calculate the new stiffness, apply another small push based on that new stiffness, and so on. This is analogous to how nonlinear solvers work:
- Load Increment/Time Step: The total load or time duration is divided into smaller increments.
- Predictor Step: An initial guess for the solution (displacements, temperatures, velocities) is made for the current increment, often extrapolated from the previous converged increment.
- Corrector Step (Iteration): The solver checks if the internal forces balance the external forces (or if residuals are within tolerance). If not, it calculates a correction and updates the solution variables. This step is repeated until convergence criteria are met for the current increment.
- Convergence Check: The solver compares the residual forces (unbalanced forces) to the applied forces or a small absolute tolerance. If they are small enough, the increment has converged, and the solver moves to the next increment.
Key Solvers and Algorithms
The ‘corrector step’ is where various algorithms come into play, each with its strengths and weaknesses:
Newton-Raphson Method
- How it works: This is the workhorse of most commercial FEA/CFD software. It uses the tangent stiffness matrix (Jacobian matrix in CFD) at the current iteration to predict the next correction. It offers quadratic convergence (rapid convergence when near the solution).
- Pros: Fast convergence for well-behaved problems.
- Cons: Can diverge if the initial guess is poor or if the tangent stiffness matrix is singular or ill-conditioned. Computationally expensive as it re-forms and re-factors the stiffness matrix at each iteration.
Modified Newton-Raphson
- How it works: Similar to Newton-Raphson, but the stiffness matrix is only updated periodically (e.g., at the beginning of each load increment, or every few iterations). This reduces computational cost per iteration.
- Pros: Cheaper per iteration than full Newton-Raphson.
- Cons: Slower convergence rate (linear) than full Newton-Raphson, potentially requiring more iterations overall.
Arc-Length Methods
- How it works: Designed for problems with snap-through or snap-back behavior (e.g., buckling analysis) where the load-displacement curve can turn back on itself. Instead of controlling the load or displacement, it controls the ‘arc length’ along the equilibrium path.
- Pros: Can trace unstable equilibrium paths, crucial for post-buckling analysis.
- Cons: More complex to set up and interpret.
Practical Workflow for Nonlinear Analysis Setup
A successful nonlinear analysis starts long before you hit the ‘run’ button. Careful preparation and understanding of solver settings are crucial.
Pre-Processing: Laying the Groundwork
- Material Models: Ensure you have appropriate material properties for the expected deformation range. For plasticity, you’ll need stress-strain curves beyond the yield point. For hyperelasticity, robust material model calibration from experimental data is essential. Software like Abaqus, ANSYS, and MSC Nastran offer extensive material libraries.
- Geometry Simplification: Remove small features that don’t significantly affect the global behavior but can introduce mesh distortions or contact complexities. Be pragmatic; overly complex geometry is a common pitfall.
- Mesh Refinement: A good mesh is paramount. Use finer meshes in areas of high-stress gradients, contact, or large deformation. Employ second-order (quadratic) elements where possible, as they often capture bending and deformation more accurately, leading to better convergence. Avoid overly distorted or poorly shaped elements.
- Loads and Boundary Conditions: Apply loads and boundary conditions realistically. Avoid sudden, instantaneous application of large loads if possible. For example, in contact analyses, ensure initial penetration is avoided or handled with contact stabilization methods.
Solver Settings: Tailoring for Convergence
These settings are your primary controls for steering the solver towards convergence.
- Time Stepping / Load Increment:
- Automatic Incrementation: Most modern solvers (Abaqus, ANSYS Mechanical) have automatic time stepping algorithms. Start with a relatively small initial increment and allow the solver to adjust it based on convergence difficulty. This is often the most robust approach.
- Manual Incrementation: For highly nonlinear problems, you might need to manually specify more increments or apply loads in smaller steps, especially at critical points like yield initiation or contact engagement.
- Convergence Criteria:
- Force/Moment Residual: The most common criterion. It checks if the unbalanced forces are below a specified fraction of the applied load or a small absolute value.
- Displacement/Rotation Increment: Checks if the incremental displacements are becoming negligibly small.
- Energy Norm: Compares the incremental internal energy to the total internal energy. Often a good overall indicator.
- Practical Tip: Start with default criteria (e.g., 0.5-1% for force residual). If struggling, you might temporarily relax them slightly, but always verify the accuracy of results. Absolute criteria are useful when loads are very small or zero.
- Maximum Iterations: Set a reasonable maximum number of iterations per increment (e.g., 20-30). If an increment consistently hits this limit without converging, it indicates a fundamental problem.
- Damping & Stabilization: For transient or highly unstable problems, artificial damping or contact stabilization (available in Abaqus and ANSYS) can help. Use with caution, as it can mask real instabilities or affect accuracy if overused.
Common Software Implementations
- Abaqus & ANSYS Mechanics: Both are powerful general-purpose FEA tools with highly sophisticated nonlinear solvers. They offer extensive options for material models, contact algorithms, and adaptive stepping.
- OpenFOAM & ANSYS Fluent/CFX: For CFD, nonlinearities arise from the Navier-Stokes equations themselves. Iterative solvers are standard. Convergence for CFD often involves monitoring residuals of mass, momentum, and energy equations, ensuring they drop several orders of magnitude.
The Art of Achieving Convergence: Strategies and Tips
Convergence isn’t just about settings; it’s about systematically approaching the problem.
Initial Guesses and Small Steps
- Start Simple: If your full nonlinear model is complex, try a simplified linear elastic run first to understand initial deformation patterns. Use these results as a warm start for the nonlinear analysis.
- Ramp Up Loads Gradually: Instead of applying 100% of the load in the first step, apply it over several steps or use a small initial load increment. This gives the solver a gentler path to follow.
- Analyze in Stages: If your model has multiple load cases (e.g., gravity, then bolt preload, then operational load), break them into separate steps. This makes it easier to track the source of issues.
Managing Divergence: When Things Go Wrong
Divergence occurs when the solver fails to find a stable solution within the specified iterations. This is often indicated by very large displacements, warnings about matrix singularity, or errors like ‘negative pivot’.
Understanding Residuals
Monitor the convergence plots (residuals) provided by your software. For example, in Abaqus, you’ll see force and displacement residuals. In Fluent, you’ll see residuals for continuity, momentum, and energy. If these values aren’t decreasing steadily (ideally by several orders of magnitude) within an increment, or if they oscillate wildly, it’s a sign of trouble.
Incremental Loading
When divergence occurs, reduce your load increment or time step size. If you’re using automatic incrementation, the solver should attempt this itself. If not, manually reduce the initial increment or total number of increments.
Damping and Relaxation
For highly dynamic or unstable problems, adding numerical damping (e.g., ‘Stabilization’ in Abaqus contact, or under-relaxation factors in CFD solvers like Fluent) can sometimes help. Be cautious, as excessive damping can smooth out true physical behavior or give inaccurate results.
Contact Stabilization
Initial overclosures or highly complex contact geometries are common causes of divergence. Many solvers offer contact stabilization techniques (e.g., ‘Stabilize’ option in Abaqus, or ‘Contact Controls’ in ANSYS). These apply small, artificial stiffnesses or damping to help establish initial contact without excessive penetration.
Checklist for Robust Convergence
- Review Material Properties: Are they accurate for the expected strain/stress range? Are they continuous?
- Inspect Mesh Quality: Check for highly distorted elements, especially near contact areas or high-gradient zones. Remesh if necessary.
- Verify Boundary Conditions & Loads: Are they physically realistic? Are there any rigid body motions not constrained? Is initial penetration prevented for contact?
- Start with Small Increments: Use automatic time stepping or manually reduce load steps, especially for the first few increments.
- Monitor Solver Output: Pay attention to warning messages, iteration counts, and residual plots.
- Isolate Nonlinearities: If multiple nonlinearities exist, try a simpler model focusing on one type first to understand its behavior.
- Check for Instabilities: Is your structure actually buckling or collapsing? If so, consider arc-length methods or buckling analysis.
Verification & Sanity Checks for Nonlinear Models
Achieving convergence is only half the battle; ensuring the converged solution is accurate and physically reasonable is equally vital. This often aligns with FFS Level 3 assessments and other structural integrity workflows.
Pre-Analysis Checks
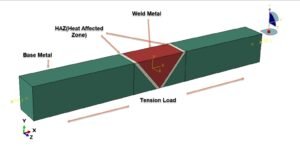
- Mesh Quality: Beyond just avoiding bad elements, ensure your mesh is fine enough to capture critical gradients. For example, in an FEA model of a fillet weld, ensure sufficient elements are through the thickness and along the curvature to capture stress concentrations.
- Boundary Conditions & Loads: Double-check constraints. Are all rigid body motions prevented? Are your loads distributed as expected? Simple ‘fixed’ constraints on thin plates can lead to artificial stresses, consider ‘remote points’ or ‘kinematic couplings’ for better load application.
- Material Property Review: Plot your stress-strain curves to ensure they behave as expected. Are there any sharp discontinuities? Have you correctly assigned different material models to appropriate parts?
During Analysis Monitoring
- Residuals & Iteration Count: As mentioned, monitor these closely. A healthy run shows residuals dropping several orders of magnitude per increment, and the number of iterations per increment remaining relatively low.
- Energy Checks: Many solvers provide an energy balance output. Ensure the internal strain energy (or kinetic energy in dynamics) roughly balances the work done by external forces. Large discrepancies indicate issues.
Post-Analysis Validation
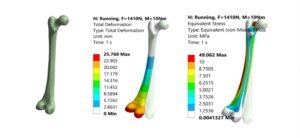
- Deformation & Stress Plots: Visually inspect the results. Do the deformations look physically plausible? Are stresses concentrated where you’d expect them to be? Is the maximum stress below the ultimate tensile strength if you’re expecting material failure?
- Reaction Forces: Sum the reaction forces at constraints and compare them to the total applied forces. They should balance. Discrepancies point to errors in loads, constraints, or an unconverged solution.
- Comparison to Hand Calculations or Experimental Data: For simpler sub-regions or similar problems, compare your results to analytical solutions or experimental data. This is the gold standard for validation. For example, compare the deflection of a beam under a nonlinear load to basic beam theory if feasible, or a tensile test coupon’s force-displacement curve to material data.
- Sensitivity Analysis: Vary key input parameters (material properties, mesh density, load magnitudes) within reasonable bounds to see how sensitive your results are. This helps build confidence in your model’s robustness.
Troubleshooting Common Nonlinear Convergence Issues
Here’s a quick guide to common problems and their solutions:
| Problem Description | Likely Causes | Actionable Solutions |
|---|---|---|
| Solution diverges (e.g., ‘negative pivot’, ‘excessive distortion’). |
|
|
| Solution takes too many iterations/long time. |
|
|
| Results are physically unrealistic (e.g., components passing through each other). |
|
|
| Model stops due to too many failed increments. |
|
|
Advanced Techniques and Tools for Challenging Problems
Automated Substepping and Adaptive Meshing
Modern solvers integrate sophisticated algorithms that automatically adjust the time step or load increment based on convergence difficulty. Similarly, adaptive meshing refines the mesh in regions of high-stress gradients or large deformation during the analysis, saving computational resources and improving accuracy without manual intervention. Both are powerful tools, especially for highly nonlinear and dynamic events.
Parallel Processing and HPC
Nonlinear simulations, especially those with fine meshes and complex material models, can be computationally intensive. Leveraging High-Performance Computing (HPC) with parallel processing significantly reduces solution times. If you’re tackling large-scale, intricate nonlinear analyses, considering options like affordable HPC rental can be a game-changer for project efficiency. EngineeringDownloads.com offers affordable HPC rental services to help you run your most demanding models faster and more efficiently.
Scripting for Automation (Python/MATLAB)
For repetitive nonlinear analysis tasks, or for setting up complex parametric studies, scripting with Python (e.g., Abaqus Python API, PyFluent, SciPy) or MATLAB can streamline your workflow, automate pre- and post-processing, and help you systematically explore convergence strategies. This is invaluable for FFS Level 3 assessments requiring numerous ‘what-if’ scenarios.
Why Mastering Nonlinear Convergence Matters
Mastering nonlinear convergence isn’t just about getting your simulations to run; it’s about confidence in your designs. Robust convergence ensures your predicted stresses, strains, temperatures, or flow fields are accurate reflections of real-world behavior. This leads to safer, more efficient, and more reliable engineering solutions, whether in aerospace, oil & gas, biomechanics, or any field pushing the boundaries of material and structural performance.
Further Reading
For more in-depth technical details on nonlinear analysis capabilities, refer to official software documentation: Dassault Systèmes SIMULIA Abaqus Nonlinear FEA